
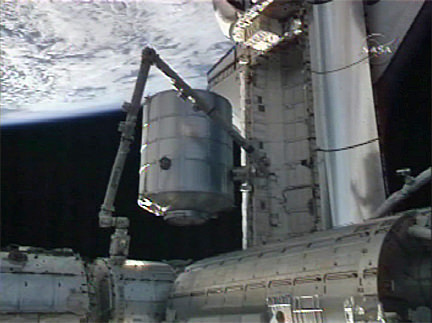
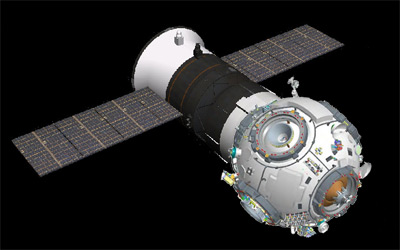
Zarya (Russian: Заря́; lit. dawn), also known as the Functional Cargo Block or FGB (from the Russian "Функционально-грузовой блок", Funktsionalno-gruzovoy blok or ФГБ), was the first module of the international Space Station to be launched. The FGB provided electrical power, storage, propulsion, and guidance to the ISS during the initial stage of assembly. With the launch and assembly in orbit of ther modules with more specialized functionality, Zarya is now primarily used for storage, both inside the pressurized section and in the externally mounted fuel tanks. The Zarya is a descendant of the TKS spacecraft designed for the Soviet Salyut program. The name Zarya was given to the FGB because it ignified the dawn of a new era of international cooperation in space. Although it was built by a Russian company, it is owned by the United States. Zarya weighs 19,300 kg (42,500 lb), is 12.55 m (41.2 ft) long and 4.1 m (13 ft) wide, discounting solar arrays.
Built from December 1994 to January 1998 in Russia at the Khrunichev State Research and Production Space Center (KhSC) in Moscow, Zarya's control system was developed by the Khartron Corp. (Kharkiv, Ukraine).
Zarya was launched on 20 November 1998, on a Russian Proton rocket from Baikonur Cosmodrome Site 81 in Kazakhstan to a 400 km (250 mi) high orbit with a designed lifetime of at least 15 years. After Zarya reached orbit, STS-88 launched on 4 December 1998, to attach the Unity Module.
Although only designed to fly autonomously for six to eight months, Zarya did so for almost two years due to delays with the Russian Service Module, Zvezda, which finally launched on 12 July 2000, and docked with Zarya on 26 July using the Russian Kurs docking system.

Unity, or Node 1, is one of three nodes, or passive connecting modules, in the US Orbital Segment of the station. It was the first US-built component of the Station to be launched. Cylindrical in shape, with six berthing locations facilitating connections to other modules, Unity was carried into orbit by Space Shuttle Endeavour as the primary cargo of STS-88 in 1998. Essential space station resources such as fluids, environmental control and life support systems, electrical and data systems are routed through Unity to supply work and living areas of the station. More than 50,000 mechanical items, 216 lines to carry fluids and gases, and 121 internal and external electrical cables using six miles of wire were installed in the Unity node. Unity is made of aluminum. Prior to its launch aboard Endeavour, conical Pressurized Mating Adapters (PMAs) were attached to the aft and forward berthing mechanisms of Unity. Unity and the two mating adapters together weighed about 11,600 kg (25,600 lb). The adapters allow the docking systems used by the Space Shuttle and by Russian modules to attach to the node's hatches and berthing mechanisms.
Unity was carried into orbit as the primary cargo of the Space Shuttle Endeavour on STS-88, the first Space Shuttle mission dedicated to assembly of the station. On 6 December 1998, the STS-88 crew mated the aft berthing port of Unity with the forward hatch of the already orbiting Zarya module.

Zvezda (Russian: Звезда́, meaning "star"), also known as DOS-8, Service Module or SM (Russian: СМ). It provides all of the station's critical systems, its addition rendered the station permanently habitable for the first time, adding life support for up to six crew and living quarters for two. Zvezda's DMS-R computer handles guidance, navigation and control for the entire space station. A second computer which performs the same functions will be installed in the Nauka module, FGB-2.
The hull of Zvezda was completed in February 1985, with major internal equipment installed by October 1986. The module was launched by a Proton-K rocket from Site 81/23 at Baikonur, on 12 July 2000. Zvezda is at the rear of the station according to its normal direction of travel and orientation, its engines are used to boost the station's orbit. Alternatively Russian and European spacecraft can dock to Zvezda's aft port and use their engines to boost the station.

Destiny is the primary research facility for United States payloads aboard the ISS. In 2011, NASA solicited proposals for a not-for-profit group to manage all American science on the station which does not relate to manned exploration. The module houses 24 International Standard Payload Racks, some of which are used for environmental systems and crew daily living equipment. Destiny also serves as the mounting point for the station's Truss Structure.

Quest is the only USOS airlock, and hosts spacewalks with both United States EMU and Russian Orlan spacesuits. It consists of two segments: the equipment lock, which stores spacesuits and equipment, and the crew lock, from which astronauts can exit into space. This module has a separately controlled atmosphere. Crew sleep in this module, breathing a low nitrogen mixture the night before scheduled EVAs, to avoid decompression sickness (known as "the bends") in the low-pressure suits.

Pirs (Russian: Пирс, meaning "pier"), (Russian: Стыковочный отсек), "docking module", SO-1 or DC-1 (docking compartment), and Poisk (Russian: По́иск; lit. Search), also known as the Mini-Research Module 2 (MRM 2), Малый исследовательский модуль 2, or МИМ 2. Pirs and Poisk are Russian airlock modules. Each of these modules have 2 identical hatches. An outward opening hatch on the MIR space station failed after it swung open too fast after unlatching, due to a small amount of air pressure remaining in the airlock. A different entry was used, and the hatch repaired. All EVA hatches on the ISS open inwards and are pressure sealing. Pirs was used to store, service, and refurbish Russian Orlan suits and provided contingency entry for crew using the slightly bulkier American suits. The outermost docking ports on both airlocks allow docking of Soyuz and Progress spacecraft, and the automatic transfer of propellants to and from storage on the ROS.

Harmony is the second of the station's node modules and the utility hub of the USOS. The module contains four racks that provide electrical power, bus electronic data, and acts as a central connecting point for several other components via its six Common Berthing Mechanisms (CBMs). The European Columbus and Japanese Kibō laboratories are permanently berthed to the starboard and port radial ports respectively. The nadir and zenith ports can be used for docking visiting spacecraft including HTV, Dragon, and Cygnus, with the nadir port serving as the primary docking port. American Shuttle Orbiters docked with the ISS via PMA-2, attached to the forward port.

Tranquility is the third and last of the station's US nodes, it contains an additional life support system to recycle waste water for crew use and supplements oxygen generation. Two of the four berthing locations are not used. One location has the Cupola installed, one has the docking port adapter, and the third one is occupied by the Leonardo PMM.
Columbus, the primary research facility for European payloads aboard the ISS, provides a generic laboratory as well as facilities specifically designed for biology, biomedical research and fluid physics. Several mounting locations are affixed to the exterior of the module, which provide power and data to external experiments such as the European Technology Exposure Facility (EuTEF), Solar Monitoring Observatory, Materials International Space Station Experiment, and Atomic Clock Ensemble in Space. A number of expansions are planned for the module to study quantum physics and cosmology. ESA's development of technologies on all the main areas of life support has been ongoing for more than 20 years and are/have been used in modules such as Columbus and the ATV. The German Aerospace Center DLR manages ground control operations for Columbus and the ATV is controlled from the French CNES Toulouse Space Center.
Kibō (Japanese: きぼう, "hope") is the largest single ISS module. This laboratory is used to carry out research in space medicine, biology, Earth observations, materials production, biotechnology, communications research, and has facilities for growing plants and fish. During August 2011, an observatory mounted on Kibō, which utilises the ISS's orbital motion to image the whole sky in the X-ray spectrum, detected for the first time the moment a star was swallowed by a black hole. The laboratory contains a total of 23 racks, including 10 experiment racks and has a dedicated airlock for experiments. In a 'shirt sleeves' environment, crew attach an experiment to the sliding drawer within the airlock, close the inner, and then open the outer hatch. By extending the drawer and removing the experiment using the dedicated robotic arm, payloads are placed on the external platform. The process can be reversed and repeated quickly, allowing access to maintain external experiments without the delays caused by EVAs.
A smaller pressurised module is attached to the top of Kibō, serving as a cargo bay. The dedicated Interorbital communications system allows large amounts of data to be beamed from Kibō's ICS, first to the Japanese KODAMA satellite in geostationary orbit, then to Japanese ground stations. When a direct communication link is used, contact time between the ISS and a ground station is limited to approximately 10 minutes per visible pass. When KODAMA relays data between a LEO spacecraft and a ground station, real-time communications are possible in 60% of the flight path of the spacecraft. Ground staff use telepresence robotics to conduct on-orbit research without crew intervention.
Cupola is a seven window observatory, used to view Earth and docking spacecraft. Its name derives from the Italian word cupola, which means "dome". The Cupola project was started by NASA and Boeing, but cancelled due to budget cuts. A barter agreement between NASA and the ESA resulted in the Cupola's development being resumed in 1998 by the ESA. It was built by Thales Alenia Space in Torino, Italy. The module comes equipped with robotic workstations for operating the station's main robotic arm and shutters to protect its windows from damage caused by micrometeorites. It features 7 windows, with an 80-centimetre (31 in) round window, the largest window on the station (and the largest flown in space to date). The distinctive design has been compared to the 'turret' of the fictitious Millennium Falcon from the motion picture Star Wars; the original prop lightsaber used by actor Mark Hamill as Luke Skywalker in the 1977 film was flown to the station in 2007.
Rassvet (Russian: Рассве́т; lit. "dawn"), also known as the Mini-Research Module 1 (MRM-1) (Russian: Ма́лый иссле́довательский модуль, МИМ 1) and formerly known as the Docking Cargo Module (DCM), is similar in design to the Mir Docking Module launched on STS-74 in 1995. Rassvet is primarily used for cargo storage and as a docking port for visiting spacecraft. It was flown to the ISS aboard NASA's Space Shuttle Atlantis on the STS-132 mission and connected in May 2010, Rassvet is the only Russian owned module launched by NASA, to repay for the launch of Zarya, which is Russian designed and built, but partially paid for by NASA. Rassvet was launched with the Russian Nauka Laboratory's Experiments airlock temporarily attached to it, and spare parts for the European Robotic Arm.
Leonardo Permanent Multipurpose Module (PMM) is a storage module attached to the Tranquility node. The three NASA Space Shuttle MPLM cargo containers—Leonardo, Raffaello and Donatello—were built for NASA in Turin, Italy by Alcatel Alenia Space, now Thales Alenia Space. The MPLMs were provided to NASA's ISS programme by Italy (independent of their role as a member state of ESA) and are considered to be US elements. In a bartered exchange for providing these containers, the US gave Italy research time aboard the ISS out of the US allotment in addition to that which Italy receives as a member of ESA. The Permanent Multipurpose Module was created by converting Leonardo into a module that could be permanently attached to the station.

Nauka (Russian: Нау́ка; lit. "science"), also known as the Multipurpose Laboratory Module (MLM) or FGB-2 (Russian: Многофункциональный лабораторный модуль, МЛМ), is the major Russian laboratory module. It was scheduled to arrive at the station in 2014, docking to the port that was occupied by the Pirs module. The date has been postponed to February 2017. Prior to the arrival of the Nauka module, a Progress spacecraft was used to remove Pirs from the station, deorbiting it to reenter over the Pacific Ocean. Nauka contains an additional set of life support systems and attitude control. Originally it would have routed power from the single Science-and-Power Platform, but that single module design changed over the first ten years of the ISS mission, and the two science modules, which attach to Nauka via the Uzlovoy Module, or Russian node, each incorporate their own large solar arrays to power Russian science experiments in the ROS.
Nauka's mission has changed over time. During the mid-1990s, it was intended as a backup for the FGB, and later as a universal docking module (UDM); its docking ports will be able to support automatic docking of both spacecraft, additional modules and fuel transfer. Nauka has its own engines. Smaller Russian modules such as Pirs and Poisk were delivered by modified Progress spacecraft, and the larger modules; Zvezda, Zarya, and Nauka, were launched by Proton rockets. Russia plans to separate Nauka, along with the rest of the Russian Orbital Segment, before the ISS is deorbited, to form the OPSEK space station.
The Uzlovoy Module (UM), or Node Module is a 4 metric ton ball shaped module that will support the docking of two scientific and power modules during the final stage of the station assembly and provide the Russian segment additional docking ports to receive Soyuz TMA and Progress M spacecraft. UM is to be incorporated into the ISS in 2016. It will be integrated with a special version of the Progress cargo ship and launched by a standard Soyuz rocket. The Progress would use its own propulsion and flight control system to deliver and dock the Node Module to the nadir (Earth-facing) docking port of the Nauka MLM/FGB-2 module. One port is equipped with an active hybrid docking port, which enables docking with the MLM module. The remaining five ports are passive hybrids, enabling docking of Soyuz and Progress vehicles, as well as heavier modules and future spacecraft with modified docking systems. The node module was conceived to serve as the only permanent element of the future Russian successor to the ISS, OPSEK. Equipped with six docking ports, the Node Module would serve as a single permanent core of the future station with all other modules coming and going as their life span and mission required. This would be a progression beyond the ISS and Russia's modular MIR space station, which are in turn more advanced than early monolithic first generation stations such as Skylab, and early Salyut and Almaz stations.
Science Power Modules 1 & 2 (NEM-1, NEM-2) (Russian: Нау́чно-Энергетический Модуль-1 и -2)
On 16 January 2013, Bigelow Aerospace was contracted by NASA to provide a Bigelow Expandable Activity Module (BEAM), scheduled to arrive at the space station in 2015 for a two-year technology demonstration. BEAM is an inflatable module that will be attached to the aft hatch of the port-side Tranquility module of the International Space Station. During its two-year test run, instruments will measure its structural integrity and leak rate, along with temperature and radiation levels. The hatch leading into the module will remain mostly closed except for periodic visits by space station crew members for inspections and data collection. Following the test run, the module will be detached and jettisoned from the station.
The ISS features a large number of external components that do not require pressurisation. The largest such component is the Integrated Truss Structure (ITS), to which the station's main solar arrays and thermal radiators are mounted. The ITS consists of ten separate segments forming a structure 108.5 m (356 ft) long.
The station in its complete form has several smaller external components, such as the six robotic arms, the three External Stowage Platforms (ESPs) and four ExPRESS Logistics Carriers (ELCs). Whilst these platforms allow experiments (including MISSE, the STP-H3 and the Robotic Refueling Mission) to be deployed and conducted in the vacuum of space by providing electricity and processing experimental data locally, the platforms' primary function is to store Orbital Replacement Units (ORUs). ORUs are spare parts that can be replaced when the item either passes its design life or fails. Examples of ORUs include pumps, storage tanks, antennas and battery units. Such units are replaced either by astronauts during EVA or by robotic arms. Spare parts were routinely transported to and from the station via Space Shuttle resupply missions, with a heavy emphasis on ORU transport once the NASA Shuttle approached retirement. Several shuttle missions were dedicated to the delivery of ORUs, including STS-129, STS-133 and STS-134. As of January 2011, only one other mode of transportation of ORUs had been utilised – the Japanese cargo vessel HTV-2 – which delivered an FHRC and CTC-2 via its Exposed Pallet (EP).
There are also smaller exposure facilities mounted directly to laboratory modules; the JEM Exposed Facility serves as an external 'porch' for the Japanese Experiment Module complex, and a facility on the European Columbus laboratory provides power and data connections for experiments such as the European Technology Exposure Facility and the Atomic Clock Ensemble in Space. A remote sensing instrument, SAGE III-ISS, is due to be delivered to the station in 2014 aboard a Dragon capsule, and the NICER experiment in 2016. The largest such scientific payload externally mounted to the ISS is the Alpha Magnetic Spectrometer (AMS), a particle physics experiment launched on STS-134 in May 2011, and mounted externally on the ITS. The AMS measures cosmic rays to look for evidence of dark matter and antimatter.

The Integrated Truss Structure serves as a base for the station's primary remote manipulator system, called the Mobile Servicing System (MSS), which is composed of three main components. Canadarm2, the largest robotic arm on the ISS, has a mass of 1,800 kilograms (4,000 lb) and is used to dock and manipulate spacecraft and modules on the USOS, hold crew members and equipment in place during EVAs and move Dextre around to perform tasks. Dextre is a 1,560 kg (3,440 lb) robotic manipulator with two arms, a rotating torso and has power tools, lights and video for replacing orbital replacement units (ORUs) and performing other tasks requiring fine control. The Mobile Base System (MBS) is 2 platforms which rides on rails along the length of the station's main truss. It serves as a mobile base for Canadarm2 and Dextre, allowing the robotic arms to reach all parts of the USOS. To gain access to the Russian Segment a grapple fixture was added to Zarya on STS-134, so that Canadarm2 can inchworm itself onto the ROS. Also installed during STS-134 was the 15 m (50 ft) Orbiter Boom Sensor System (OBSS), which had been used to inspect head shield tiles on Space Shuttle missions and can be used on station to increase the reach of the MSS. Staff on Earth or the station can operate the MSS components via remote control, performing work outside the station without space walks.
Japan's Remote Manipulator System, which services the JEM Exposed Facility, was launched on STS-124 and is attached to the JEM Pressurised Module. The arm is similar to the Space Shuttle arm as it is permanently attached at one end and has a latching end effector for standard grapple fixtures at the other.
The European Robotic Arm, which will service the Russian Orbital Segment, will be launched alongside the Multipurpose Laboratory Module in 2017. The ROS does not require spacecraft or modules to be manipulated, as all spacecraft and modules dock automatically and may be discarded the same way. Crew use the two Strela (Russian: Стрела́; lit. Arrow) cargo cranes during EVAs for moving crew and equipment around the ROS. Each Strela crane has a mass of 45 kg (99 lb).